Yifeng Tang
Biography
I am currently a second year PhD student of Centre for Robotics and AI, the University of Manchester (UoM), and I am also a Doctoral Candidates of the EU Marie Sklodowska-Curie Action (MSCA) Doctoral Network (DN) MSCA-DN, RAICAM. My research interests include robot learning, robotic manipulation, and reinforcement learning.
I received my bachelor’s and master’s degrees from Chongqing University(CQU) in 2020 and the University of Chinese Academy of Sciences(UCAS) in 2023, both in Control Science and Engineering.
You can access my publications via Yifeng Tang`s Google Scholar.
Robots
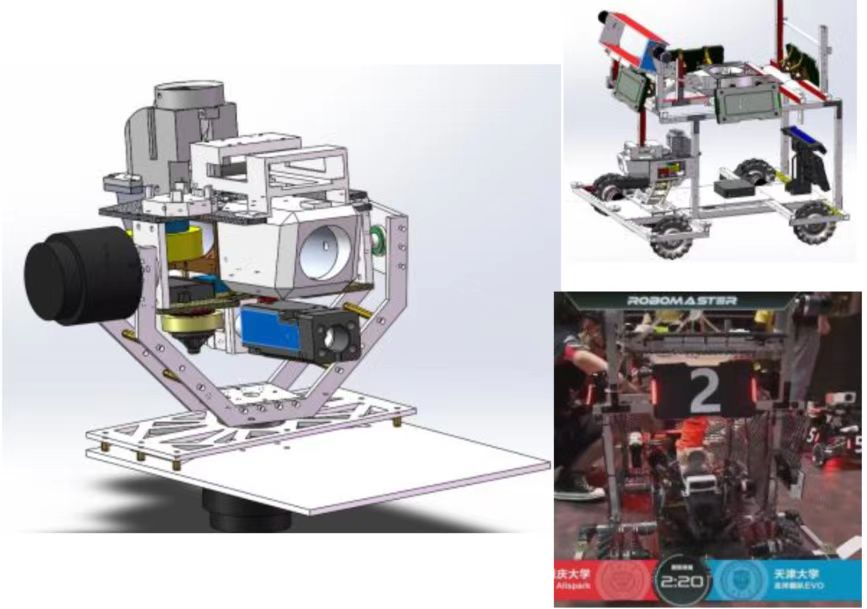
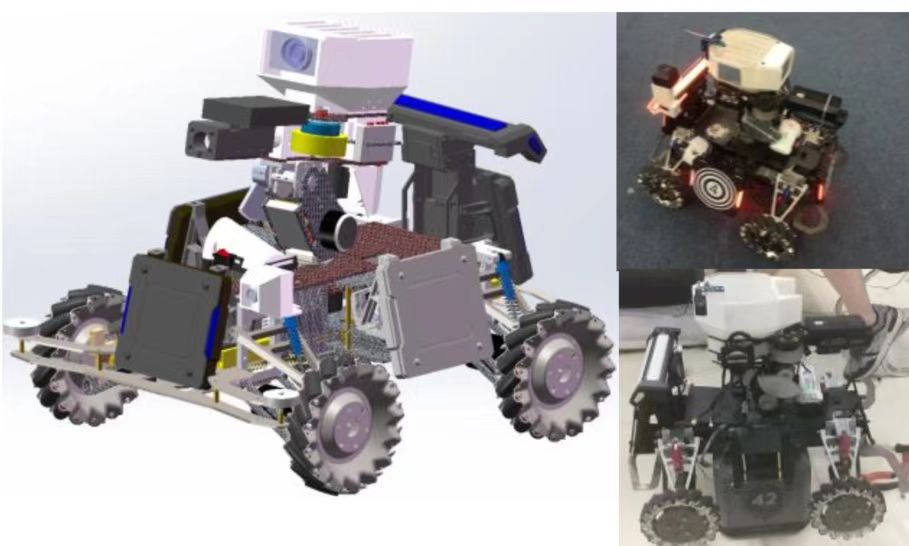
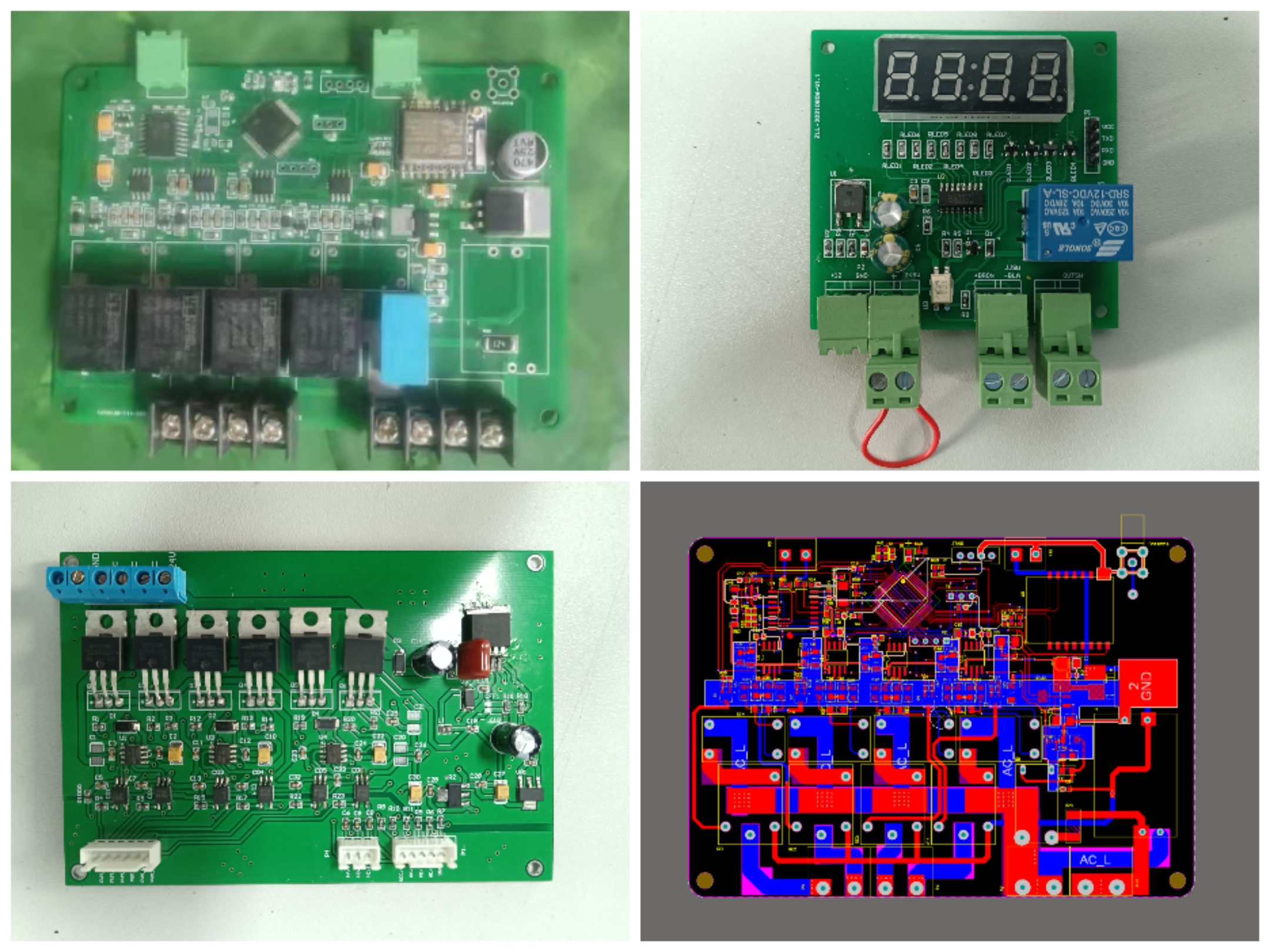
My story with robots started from a global competition Robomaster. We formed teams according to the competition rules and completed task assignments. Team members designed mechanical structures, hardware circuits, and software algorithms. The following pictures are my design during 2016-2018.
Then, from 2019 to 2022, I served as the team’s supervisor, guiding subsequent students to complete a series of excellent projects. 

You can see more designs from the website of one of my most talented students, Jiajian Fu.
Projects and publications
From 2020-2023, I served as a master student of UCAS and also an engineer in SIAT-robot. My work included designing the autonomous driving control system and learning from demonstration for the robotic arm.
Autonomous Driving
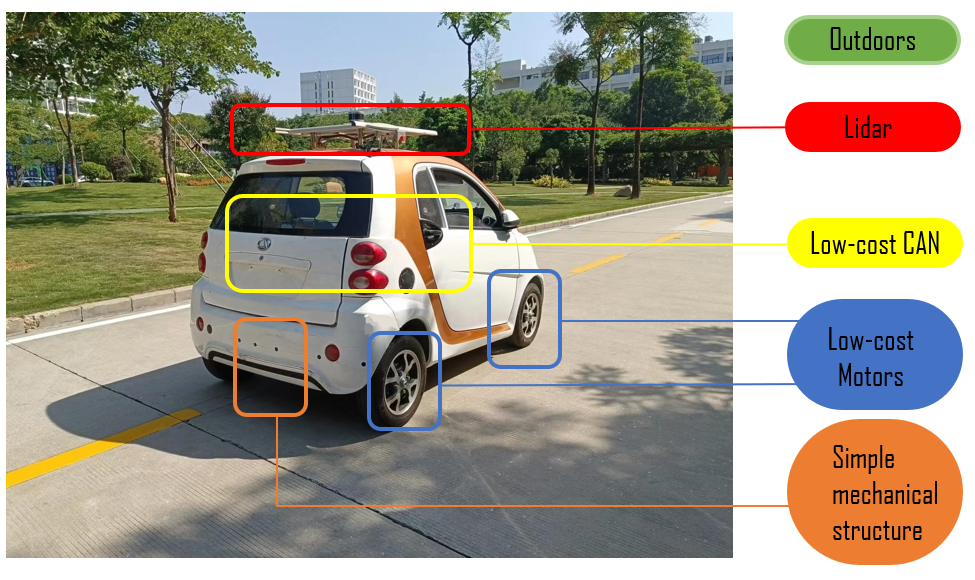
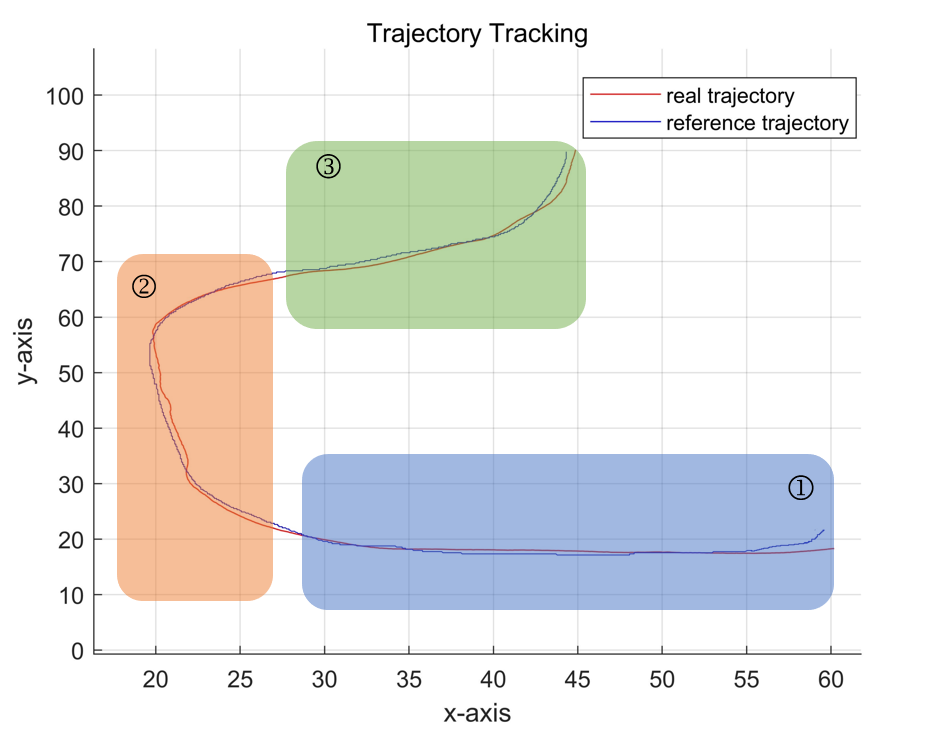
I developed the control and local planning software module using C++. I designed two control algorithms: one is model predictive control, and the other is nonlinear control. I primarily devoted my time and effort to engineering tasks in this project.


Access the papers MPC, Nonlinear.
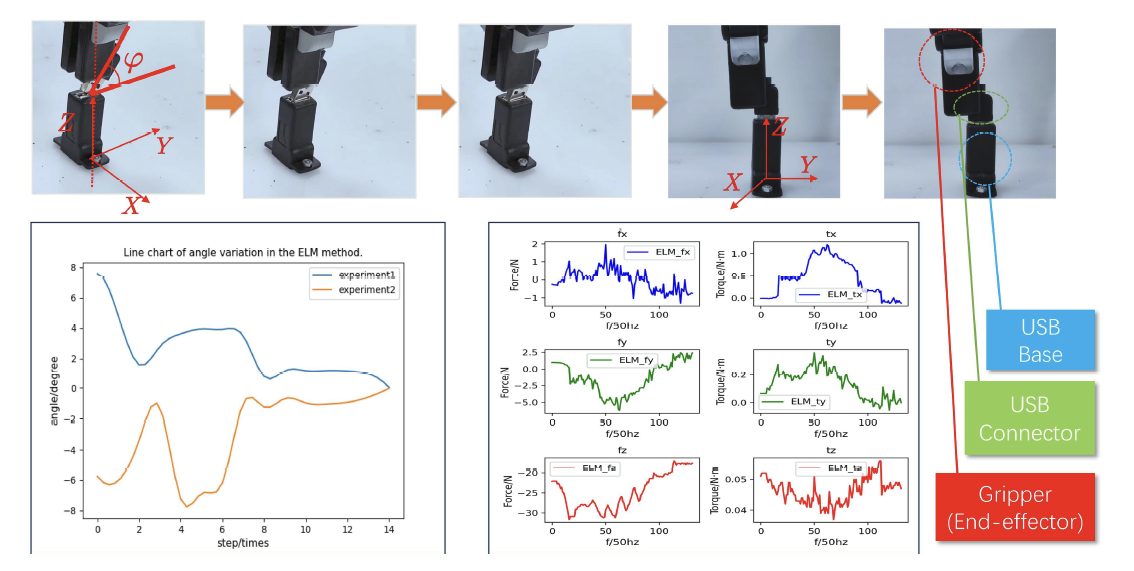
Learning from Demonstration(LfD)
I also completed the operation of a robotic arm through demonstration learning, where I was mainly responsible for designing and deriving the control laws. In this article, we present, for the first time, a stability proof that considers force-position information and validate it on a real machine.
The paper TIE.
Game-theoretic RL controller for legged robot locomotion.
In legged robots, the stance (support) leg and swing leg inherently exhibit a game-theoretic relationship in their influence on the overall system behavior. To address this, I designed a game-theoretic reward structure, treating the stance and swing legs as independent yet coupled agents. This framework was employed to train the control policies of both legs, and I provided a theoretical proof for the existence of a Nash equilibrium within this setup. The associated software implementation was jointly developed in collaboration with my research partner, D.C., from the FORTH Institute in Greece.